使用したケースは、タカチ電機工業の「UC型ユニバーサルアルミサッシケース」シリーズの中から、UC26-7-20BBという幅260×高さ70×奥行200mm(黒色・放熱穴付)のものを使いました(下の写真)。

なお、このケースにはシャーシが付属せず別売となっています。シャーシがないと、部品を実装するために下カバー(ケースの底)に穴を開けることになってしまうのでシャーシは必要なのですが、その寸法を見ると、シャーシ裏から下カバーまでの距離が最低でも10mmもあり、ケース内の空間を有効利用できていません。そこで、その距離が5mmになるようシャーシは自作することにしました。
シャーシを自作するといっても、別売のシャーシと同じ方法で取り付けるので、別売の「シャーシ取付金具 UCK-P42」が必要です。
コンパクトにするためこのケースを使用しましたが、少々窮屈です、もう一回り大き法が良いようです。
13.ケースの加工
下図に、シャーシ(上)と仕切り板(下)の寸法図を示します。仕切り板は、ケース内を電源部分とアンプ部分に仕切るもので、アンプ用電源を取り付ける場所でもあります。


フロントパネルおよびリヤパネルは、下図のように加工します。
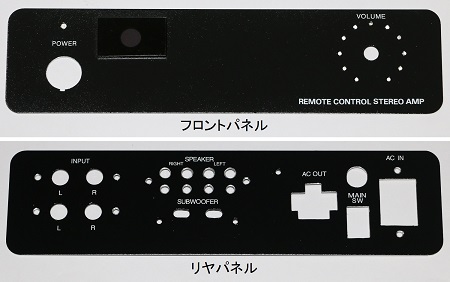
インレット型ノイズフィルタの固定はM3×8mm黒色サラビス、その他のビスはM3×10mm黒色バインドビスです。

次の写真はフロントパネルの部品実装状態です。パワーインジケータの穴は、紫外線硬化型接着剤で埋めて表示灯のようにしておきます。
リモコン受信基板の貼り付けは、タカチ電機工業の「貼り付け型スペーサAST3-6B」を使っています。ボリュームシャフトの穴周囲にあるのは、ボリューム目盛りが光る仕掛けで、次項で作り方を説明します。

14.光るボリューム目盛りの製作
ボリューム目盛りは単なるマークではなく、LEDで光るようにして存在感と視認性を高めました。
フロントパネルの目盛り部分は、前出の加工寸法図にあるようにφ2mmの穴になっています。まず、その穴が表示灯となるように透明の紫外線硬化型接着剤で埋めておきます。このとき、接着剤が裏側に盛り上がらないようにマスキングテープを貼って、表から作業します。また、できるだけ穴の中に気泡が残らないように注意します。
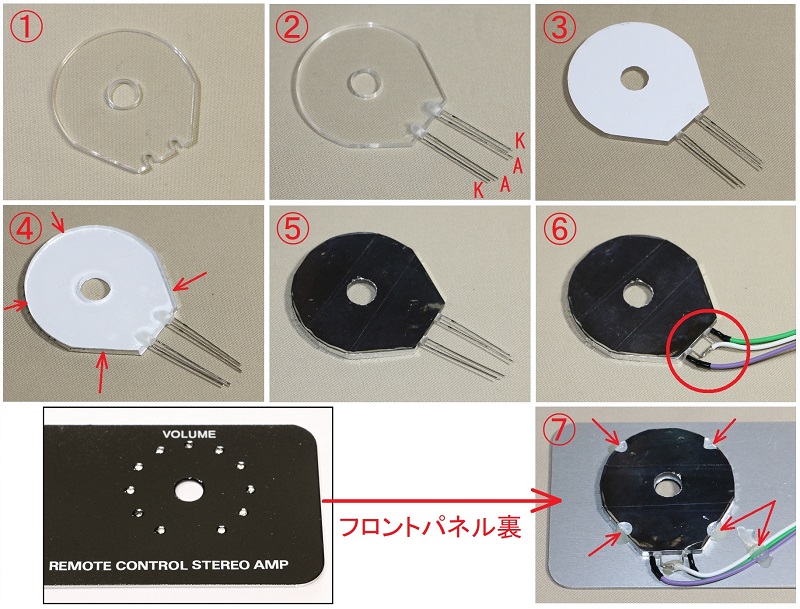
下の写真で作り方を順に説明します。
① 3mm厚の透明アクリル板を写真のように切り出します(外径は約47mm、中央の穴はφ10mm)。
② 2ヶ所のくぼみに白色LED(OSW44L3E32B)を瞬間接着剤で付けます。
③ 片面に白色のカッティングシートを貼ります。
④ 周囲に銀色の装飾テープ(アルミテープ)を貼ります。
⑤ カッティングシートと同じ面に、銀色の装飾テープを貼ります(できるだけ光が漏れないようにします)。
⑥ LEDのアノード同士を接続し、3本の電線をはんだ付けします。
⑦ ボリュームシャフトの穴に合わせて、フロントパネル裏にエポキシ系接着剤で数か所接着して固定します(透明のアクリルの面がパネル側です)。
15.赤外線リモコンの使い方
使用したリモコンは、秋月電子通商で購入したオプトサプライ製の赤外線リモコン(OE13KIR)です。このアンプでは、13個のボタンのうち、右に示す割り当てで5個を使用しています。

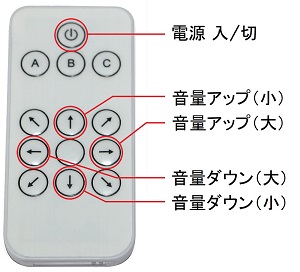
音量調節では、電動ボリュームの回転が少し速いので、それに対処するためと微調節ができるようにするため、一度のボタン操作またはリピートで約50mSずつ回すようにしています。つまり、ボタンを押し続けるとリピートによりステップ回転します。
速く回す機能もあります。←/→ボタンを押すと、一度の操作で約110mS回します。リピートコードの間隔は108mSなので、これらのボタンでは連続的に回せることになります。なお、この←/→ボタンによる音量調節機能は、制御基板上のジャンパーピンをショートすると無効になります。
リピートコードに関する注意点ですが、最初のリピートコードはデータ部の終わりから数十mSで送信され、以後のリピートコードより短い時間でやってきます。そのため、最初だけ2回分(約100mS)回すことになってしまうことになります。そこで、前回の受信から約70mS以内に受信したコード、つまりデータ部の次のリピートコードを無視するようにしています。
【備考】モーターの回転が速いため、ボリュームの動きも少し速いです。電源電圧を変えなくても、モーターの電源をPWM制御すれば、見かけの電圧を下げられるので回転を落とすことができると思いますが、ここでは実施していません。
↓
【修正】PWMではありませんが、デューティ約50%のパルスで駆動するように修正しました。これにより、見かけの電圧を下げることができ、回転を落とすことができました。回転自体もスムースになりました。
↓
【修正】PWMではありませんが、デューティ約50%のパルスで駆動するように修正しました。これにより、見かけの電圧を下げることができ、回転を落とすことができました。回転自体もスムースになりました。
16.リモコン信号のデコード方法
リモコン信号のデコードは、マイコンATtiny44Aの16ビットタイマ1のインプットキャプチャ機能を使って、受信信号のパルス幅を測ることによって行っています。
インプットキャプチャ機能は、ICP1端子のH/Lが変化したときのタイマカウンタの値を保持するので、前回の変化からの時間つまりパルス幅を測ることができます。しかも、割り込みを発生できるので、メインの処理にほとんど影響を与えずに動作します。
ただ、このように受信信号のH/L変化でパルス幅を測定する方法は、ノイズに強いとは言えません。ICP1端子にノイズ除去機能がありますが、それで取り切れない変化でインプットキャプチャは反応します。
プログラム上は、ノイズのような規定にない幅のパルスが含まれていた場合は無視するようにしているため、リモコンのボタンが効かない、あるいはリピートが止まるというようなことが発生する場合があります。
データ部のエラーチェックは、メーカーコードとデータコードそれぞれについて、反転コードをさらに反転したものと一致するかで判断します。一致しなければ受信エラーとして無視します。
ちなみに、メーカーコードが赤外線リモコンOE13KIRのメーカーコードと一致しない場合は、異なるリモコンの信号として無視します。